This is a build and setup guide for the new BeeRotor u210.


Here's some footage from the maiden flight:
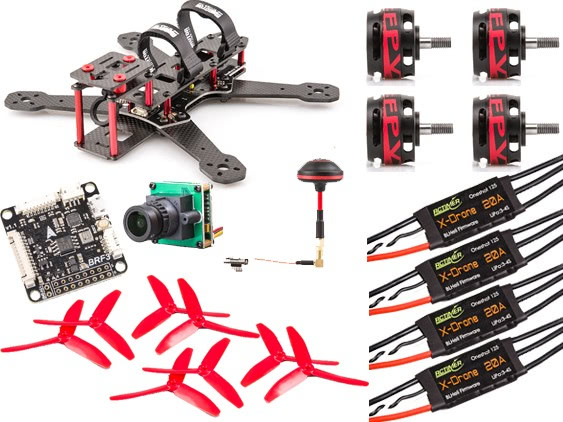
Parts
Everything you need except the transmitter and receiver, battery and charger is included in the kit! You'll also want some good goggles if you're just getting started.



~$180If you already have the items above, get just the drone kit. It has everything you need including video transmitter and camera.
Total Cost: $239.99
Tools
Before we get started make sure you have the following tools and misc parts on hand:
-
A proper hex driver set. You'll need something that fits a 2.0mm hex socket head. I broke two right angle allen wrenches trying to screw the carbon plate to the plastic pieces of the quad-copter frame.
-
Soldering Iron. I have a Weller WES51
-
Blue Threadlocker. The cheapest place I've found to get this is Harbor Freight, if you have one locally.
-
A CP2102 USB/UART adapter for flashing and configuring the OSD.
-
This bike wrench works great for attaching and removing props. For $1.69, you can't go wrong!
Review

The BeeRotor u210 uses an integrated PCB to make assembly easy. Combining this with the standard carbon fiber top and bottom plates (2mm) and 3mm carbon fiber arms, we get this without sacrificing strength.
It also decreases assembly time. I built mine in about 2 hours!
This is awesome, everything you need is included!


The frame kit even comes with an XT-60 lead, zip ties and battery straps!

You might be thinking "why would I want to buy this when I could just get a separate PDB, flight controller, frame, etc." Well, besides being easier to build, there are some really cool things that make this specific setup awesome.
First, you might have noticed that the PDB has some extra stuff on it. Notably these capacitors, which are inline with the ESC power wire and help minimize system noise caused by the ESCs.

Also, checkout these ESC covers. They may not seem that amazing at first, but they're awesome because they let you easily change the motor connections on your ESC without cutting off the heat shrink, after you've assembled your quad.

Another interesting design choice is how the ESC signal wires are passed from the flight controller to the PDB:

Unfortunately, this requires soldering the flight controller to the PCB, which makes it a little harder, but not impossible to remove later. I think it would be nicer if instead, we soldered headers on the flight controller and used wires that were soldered to the PDB and terminated in 2.54mm female jumpers, much like how the video, beeper, led and power pins are set up.
In general, the PDB is really high quality, gold plated, 2mm thick:

The main carbon fiber plate is 2mm:

The arms are 3mm:

The actual voltage regulator components are on the bottom of the board

Motor to motor distance is about 140mm back-to-front

Side-to-side the motor distance is about 170mm

It fits 5" props, just barely :)

Build
Let's built this!
PDB
Start with the PDB, let's attach the flight controller leads for the buzzer and video inputs and outputs. Tin these pads. You'll notice the ground pads are much harder to tin. This is because they're connected to the plane of the PCB which is a very large surface and takes longer to heat up than the other pads. You can turn up your soldering iron for these pads or just heat them for a little bit longer.

I used the video leads from the BRF3 package, which are a bit longer, you'll see why in a bit. I trimmed them to about 60mm and tinned them.

It helps to use tweezers to align the wires and the pads.

Solder the leads on going across the board, then fold them back like so:

Plug in the PDB connector. This wire carries power from the PDB's voltage regulator to power the BRF3.

Now install the Video Transmitter (VTX). There are 3 pins on one side and 4 pins on the other, so it only fits one way.

Flip the board over and solder the 7 pin headers into place. It's not absolutely necessary, but it makes soldering slightly easier if you use a flux pen to flux the joints first. Just touch the tip of the pen to each pin to get some flux liquid in the joint before soldering.

If the solder isn't coming down onto some of the solder pads, it just stays on the pin and you can see the gold pad still, turn up the heat on your iron.

Adding a capacitor to the video power supply is not absolutely necessary, but it will help eliminate noise from the video signal. This is especially important when there are more power fluctuations in the system. These power fluctuations are caused by the motors and the ESCs as they draw power (when throttling up) and add power (throttling down with damped light) into the system. The capacitor acts as part of an LC filter to help smooth out these power fluctuations.
Since a capacitor is included, let's go ahead and solder it onto the VTX.
Capacitors do have a polarity (plus and minus side), so be sure to solder the pin with the white stripe to the far side of VTX's yellow component (which is also a capacitor, by the way) and the pin without the white stripe, to the far side of the black component (this component is a diode).
I'll mount the capacitor here, to minimize any chance that it could get in the way or be damaged in a crash. Note the folded arm is the "white stripe" side in this photo:

Then I bent it like this, then trimmed the excess length from the pins.


Tin the end of the capacitor pins.

Tin the solder points on the VTX and then solder them together by putting a little blob of solder on your iron, holding the components together and touching each joint to let the solder flow between them.

We're done soldering for now, so grab the included flight controller mounting hardware. Mine all came in a little bag: black plastic M35mm standoffs, M312mm bolts (the longer ones in the little bag) and clear nylon nuts.

Install the bolts through the bottom of the PDB and screw on the black standoffs. Don't use any threadlock, since threadlock will melt plastic nuts and bolts! Tightening them with your fingers should be enough, since the second nuts we're about to install will act like a locknut.

Note how the inside of the mounting holes on the PCB are not coated with a conductive material. This is great as it means the board can be safely mounted with metal screws or standoffs and it will not conduct through the screws.
Now we can attached the BRF3 flight controller. Plug in all the connectors first.


We're about to cover the GPS port with the beeper, so if you're going to use that in the future, plug it in before installing the flight controller.

Here you can see why I used the longer video leads. I routed the wires around the post so they're clear of the OSD programming port to make access easier later.

Now push it down onto the mounts and install the clear nuts. The one by the Spektrum satellite port doesn't rotate, so back out the bolt and re-tighten it, going through both the standoff and the clear nut.


Solder the ESC pins. It would be nice if these were a SH1.25 connector on the PDB side with female 2.54mm headers on the other side, so the flight controller could be removed without de-soldering these in the future.

Now let's install the arms. You'll need the bag of 8 locknuts, the bag with 8x M3x12mm bolts, the arms, the bottom plate and the assembled PDB.

You can put the bolts in either way, since the battery won't be strapped to the bottom, but it feels cleaner to me to put the nuts on the inside, so I installed them like this:


ESCS and Motors
Prepare the ESCS by removing the heatshrink.

Remove the motor leads, the ground wire (untwist it from the signal wire first).

The first time I tried this, I trimed the power leads to 20mm and the signal lead to 10mm. This didn't work so well, so instead trim to about 45mm and 25mm respectively. Notice the ESC on the left has much shorter leads:


I'll show you how to mount the ESCs like the one on the right in the photo above, to give the most flexibility allowing you to move it towards the frame or towards the motor. This will allow you to easily add or remove the landing gear from the hole in the quadcopter arm, without removing the ESC or motor.

Trim the ESC power and signal leads like so:

Tin the pads and leads, then solder the power and ground wires from the ESC onto the PDB. Make sure you solder the red to + and black to -. I had to turn my soldering iron all the way up for this, even then, I don't think it was hot enough as the solder did not flow into a nice blob. It works, but isn't super pretty.

Then flip the ESC over and solder the signal wire.

Finish all four:

Trim your motor wires to about 35mm. Strip and tin the wires.

Solder the motor wires to the ESC. Note that motors M2 and M3 should be wired in the same order that they come out of the motor and motors M1 and M4 should have any two wires swapped. This can always be changed later if you forget, but it will save you from swapping two wires or changing the motor direction in BLHELI if a motor is rotating the wrong way.
M2 and M3 wiring:

M1 and M4 wiring:

Done!
While you have your soldering iron out, go ahead and solder on the XT-60 battery connector as well.

Now install the plastic covers (which are awesome, btw) and bolt on the motors using the M3x6mm bolts and some blue threadlock. Use an ample amount of threadlock and tighten securely, but don't over tighten. It is possible to strip the tapped holes in the motors, so be careful. Finger-tight is enough.


Receiver
Now would be the ideal time to plug in your receiver cable. I had to go back and do it later, but it's a bit easier if you do it before installing the top plate. Check the pinouts on the BRF3 article if you're not sure how these should be wired.


Here is my FrSKY XSR, wired for SBUS.


Find your video cable as well. Move the populated pins on the video header to the Video, Ground and 12v pins. Use a safety pin to release the wires from the connector as necessary.


Let's assemble the top plate next. Grab the top plate, the camera plate, the two longer standoffs, four mid-size standoffs, four short standoffs and 12 of the smallest, M3x5mm screws. Using locktight, screw everything into place. Don't forget to install the two mid-size standoffs on the back, like I did :)


Install the little black rubber gasket in the VTX hole. Insert the VTX SMA adapter through the black rubber gasket. This isn't easy. I had to push a pen through the hole first to open it up a bit, then shove the SMA adapter into the hole with the gasket then twist the plate to screw it onto the SMA adapter. Even though it's a snug fit, don't leave off the grommet! That would ground the carbon fiber frame to the video transmitter, which could wreak havoc on your video signal.

With the brass washer between the rubber gasket and the nut, tighten the VTX Adapter nut down using a 8mm socket wrench.

Now would be a good time to install the velcro straps on the top plate. I didn't do this until later and it was much more difficult.
Also, if you're mounting the receiver to the top plate, zip tie that on now:

Grab the four longer M3x8mm screws and four more M3x5mm screws and install the top plate.
Camera
Install the camera using the included camera mount.

Go as crazy as you want with the up-tilt:

Don't forget to put one of the shorter little screws in the bottom of the mounting ring to hold the camera in place:

Install the red vibration dampeners, then the camera plate:

I like to put some zip ties on the frame, ends pointing up. Then use some heat shrink tube to attach these to the receiver antennas:


Configuration
Now let's take a moment to test the motor direction, receiver, camera, and OSD before finishing the installation.
Make sure you install an antenna on your VTX before powering it up, to avoid any damage to the transmitter. Make sure you use the proper type of antenna connector. You'll need one with a pin in the middle. Using one without the pin could cause damage to the video transmitter.

BetaFlight Configuration
Now let's flash and configure the latest version of BetaFlight.
See the full configuration guide over on the Victory 230, BetaFlight configuration guide, but basically:
-
download the latest release from the release page.
-
paste my config into the cli: https://gist.githubusercontent.com/nathantsoi/01207634878624ab6e03353c75291ce5/raw/beerotor-u160-betaflight.txt. Then type
SAVEand hit enter. -
switch to PPM if you're not using SBUS
-
be sure to calibrate your accelerometer
Scarab OSD
Flash the latest version of Scarab OSD using your CP2102. Connect it like this:

My Config.h is available here: https://gist.github.com/nathantsoi/ac3a3c01f21089cf1bc2
- to use, click
Rawand then save as Config.h in theMW_OSDfolder you extracted from the ScarabOSD release page.
My scarab-osd.osd is available here: https://gist.github.com/nathantsoi/1ba3c5cc4892022b04ab
- to use, open the GUI, connect and click the little
LOADbutton on the left, underDISK. Then hitWRITEunderOSD CONTROLS

If you don't get text overlay, try switching from NTSC to PAL. Don't worry, almost all monitors and goggles handle either PAL or NTSC. Unfortunately, my HMDVR crops PAL video.

If your display doesn't have all the fields, open the layout editor, update anything (or nothing) and hit WRITE

If you're fonts look all weird, under FONT TOOLS hit SELECT open the data folder and pick the font you want to use. I used default.mcm. Hit Open then hit Upload, still in the FONT TOOLS section.

Follow the OZE32 ScarabOSD flashing guide for more details.
Calibrate your ESCS
Follow the ESC Calibration Guide
Test your failsafe
Be sure to check your failsafe before you fly.
Read the whole pre-flight checklist here.